Force Feedback¶

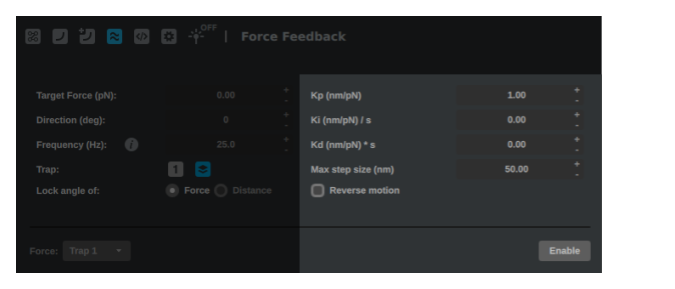
Force feedback is responsible for keeping the selected force stable by using a PID loop. This module breaks down into Target Settings and PID Settings.
Target settings¶

Target Force¶
The target force in pN.
Direction¶
This setting has different implications for the options in Lock angle of.
- In
Lock angle of: Force, it will define the direction of the resulting force vector. - In
Lock angle of: Distance, it defines the direction in which the controlled device can move.
Frequency¶
The frequency in Hz with which force feedback will respond to changes in forces. A higher frequency means a lower latency in response to force changes. How high the the frequency can be set is dependent on the sample rate and latency of the data acquisition card used to read force data.
Trap¶
The target device on which the calculated displacement will be exerted. Not to be confused with the device selected by Force.
Lock angle of:¶
- In
Forcethe corrective movements are calculated separately for the X and Y axis. This means that in this mode the trap can move freely to keep a constant force vector of the given target source with the angle described byDirection (deg)with respect to the target trap, which prioritizes a constant force between traps in a specific direction. - In
Distancethe corrective movements are calculated conjointly for the X and Y axis. This means that the trap will only move over the line as described byDirection (deg)to keep a constant force on this axis, which prioritizes a constant angle between two traps with all corrective movements exerted over a fixed line.
Force¶
The source device which will provide the force data from which corrective movements will be calculated. Not to be confused with the device selected by Trap.
PID settings¶
Force Feedback keeps forces between traps stable at a target using a PID loop. Some basic information on PID loops found on the National Instruments website. The PID loops as used by the Force Feedback module break down to the following three components:
Kp¶
The proportional gain in nm / pN. It determines how much the difference between the set target force and the measured force affects the corrective force.
Ki¶
The integral gain in (nm / pN) / s. It determines how much the response increases over time when the corrective movements do not bring the target force correctly to its target.
Kd¶
The derivative gain in (nm / pN) * s. It determines how strongly a change in difference between the set target force and the measured force affects the corrective force.
Max step size (nm)¶
The maximum displacement in nm exerted in a single corrective step.
- In
Lock angle of: Forcethis means the maximum displacement in one step on both the X and Y axis. - In
Lock angle of: Distancethis means the maximum displacement in one step over the line described byDirection (deg).
Reverse motion¶
Enabling this setting reverses the output of the PID loop.
Timeline¶
Tuning the force feedback module right can be hard without visual clues. For that reason the following timeline channels are selectable with which you can visually see how force feedback is responding to your current configuration.
Error¶
The difference between the target force and actual force in pN.
Command X¶
The corrective steps on the X axis taken over time in μm.
Command Y¶
The corrective steps on the Y axis taken over time in μm.
Process Value¶
The monitored force in pN.
- In
Lock angle of: Forcethis will match the corresponding LF force channel. - In
Lock angle of: Distancethis will match the magnitude of the projected force.